Après m’être égaré pendant quelques mois dans la découverte comme la pratique assidue de l’intelligence artificielle générative pour produire des images sur des sujets variés, sans compter un planning très chargé sur le plan professionnel comme sur le plan personnel (travaux d’intérieur notamment), une petite semaine de repos fin avril fut l’occasion de reprendre un peu mes affaires en main en ce qui concerne la pratique astronomique, très exactement où elles furent abandonnées fin décembre. Les dernières mises à jour de l’application propriétaire et du firmware du Seestar S50 par ZWO survenues au cours de ces quatre derniers mois auront permises entre-temps de corriger le bug de pointage affectant exclusivement les objets personnalisés aux cordonnées et d’améliorer notablement la qualité globale de suivi sidéral de cet astrographe pour moins de rejets d’images pour les poses unitaires les plus longues (de 30 sec à/et 60 sec), en augmentant l’ampérage alimentant les moteurs ; chose s’illustrant notamment pour les ouïes fines par des moteurs sensiblement plus bruyants quand ils tournent à vitesse maximale de pointage (notamment celui de l’azimut).
Travaux de printemps qui seront de même marqués par l’évolution de mes licences de Tycho Tracker de la version V12.7 vers la V13.5, profitant à la fois d’une offre à prix réduit de 50% pour la première licence et d’une gratuité totale pour la seconde selon le contexte de l’évolution : Passage d’une licence standard V12 à une licence professionnelle V13 pour mon ordinateur portable Windows afin de bénéficier dorénavant de même, de toutes les fonctions du produit en itinérance (notamment en photométrie d’étoiles variables) et le passage d’une licence V12 Pro à la V13 Pro sur ma station de travail fixe sous MacOS pour faciliter les analyses sur de très grosses séries d’images quand mes observations sont réalisées depuis le rooftop de mon domicile. Deux nuits (25 et 28 avril 2026), reclus dans le calme de la campagne Val D’Oisienne, seront mises à profit pour répondre à plusieurs questions et en provoquer d’autres :
- Pointage d’un premier astéroïde de magnitude 16 par phase lunaire de 62%
- Pointage d’un second astéroïde de magnitude 17 par phase lunaire de 96%
- Première expérimentation technique du pointage et acquisition d’images en utilisant NINA
Pointage de l’astéroïde (29943) 1999 JZ78 de magnitude 16
Le 25 avril 2026, après avoir capturé préalablement les 19 champs d’étoiles variables que je m’étais mis au programme, j’ai effectué mon premier test sur objet très faible en choisissant l’astéroïde 1999 JZ78 pour cible. Découvert le 13 mai 1999 par le programme LINEAR depuis le Nouveau-Mexique (Etats-Unis), il s’agit d’un objet de 40 km de diamètre environ appartenant à la ceinture principale d’astéroïdes. Les 211 images analysées sous Tycho Tracker V13.5.1 tout dernièrement uploadé sur mon PC itinérant démontrent à la fois la sensibilité exceptionnelle du Seestar S50 mais aussi les progrès inhérents à la nouvelle version V13 de Tycho Tracker en matière de détection ; cela malgré une lune déjà imposante de 62% qui éclaire fortement le ciel. L’astéroïde est bien au rendez-vous avec son déplacement clairement identifiable (la toute dernière fonction native de création d’un gif animé d’un blink de détection représentant notamment la nouvelle évolution majeure apparue dans la V13 de Tycho Tracker pour documenter avec certitude des détections).
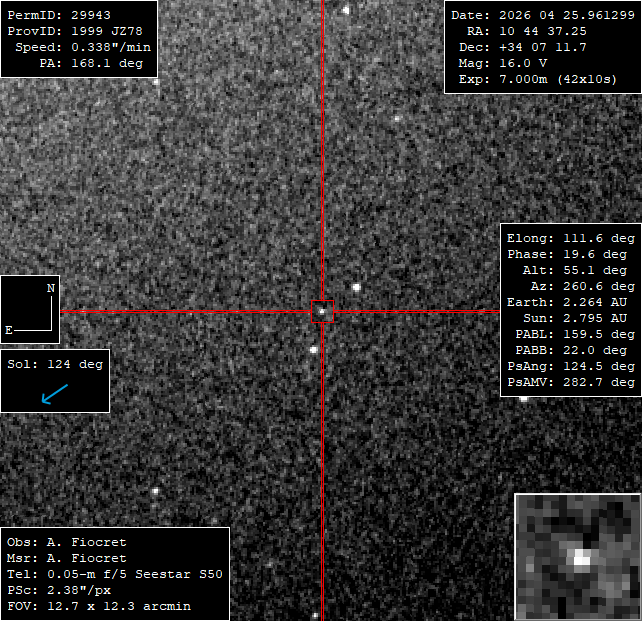
First Selected Obs=[2026 04 25.955102]
Last Selected Obs=[2026 04 25.979595]
Timespan=35.27 minutes; max residual = [0.847]
Mean RA residual = -0.547 +/- 0.228
Mean DE residual = 0.327 +/- 0.306
Un résidu astrométrique inférieur à 1″ plutôt exceptionnel en rapport de la magnitude de la cible et de l’instrument utilisé.
Premier essai sur M101 avec NINA et pointage de l’astéroïde (4833) Mégès de magnitude 17
Le 28 avril 2026, les conditions météorologiques ne sont guère engageantes en début de nuit. De gros cumulus au gré du vent circulent vite dans le ciel pendant la première heure dehors et les projections des modèles météo ne sont guère rassurantes jusqu’à 1h du matin. Néanmoins, ma voix intérieure y croit ; ceci ne me dissuade pas d’aller au bout des préparatifs de mon objectif de cette séance en installant mon Seestar et en disposant tout le reste de mon matériel en extérieur tel que mon ordinateur portable qui permettra de faire mes premiers pas avec NINA. Dès peu avant minuit, après une heure d’incertitudes, le ciel est totalement dégagé et ne se recouvrera pas de toute ma séance jusqu’à 3h de matin permettant d’aller au bout de mes idées. Quand on utilise pour la première fois une nouvelle interface, on a beau avoir fait des tests préliminaires en intérieur, notamment souvent pour s’assurer tout simplement que NINA et le Seestar communiquent correctement ; se plonger dans la pratique réserve régulièrement des surprises : c’est la première fois face au ciel que l’on apprend toujours véritablement à utiliser un logiciel car faire pointer correctement le Seestar avec NINA sur une cible ne sera pas immédiat mais cela aura réservé l’énorme avantage de découvrir la précision chirurgicale du pointage par NINA par résolution astrométrique du champ via ASTAP qui ne laisse pour le coup pas la moindre possibilité à l’erreur (ce qui est déjà pas si mal pour adopter ce logiciel, surtout pour de l’utilisation scientifique !). Pour la première fois avec NINA, le Seestar fut utilisé d’une façon entièrement manuelle avec l’accès distinct sur chacun de ses composants (caméra, monture, tiroir à filtres, focalisation).
L’objet visé pour ce test purement technique (sans la moindre recherche qualitative) est la galaxie M101 de la Grande Ourse ; les 67 images lights capturées sont de vraies brutes véritablement personnalisées (15 secondes de pose avec gain à 100), les 20 darks sont de même capturés pour produire ultérieurement le master dark pour calibrer les images par suppression du bruit d’obscurité du capteur et les fichiers FITS ne se chargent pas dans la mémoire interne du Seestar mais directement sur le répertoire de l’ordinateur. Beaucoup de différences notables entre la philosophie propriétaire de ZWO (depuis un smartphone ou une tablette) et ce qui résulte du pilotage du Seestar par NINA dont le principal point fort consiste à court-circuiter complètement le firmware en utilisant uniquement sa couche native ASCOM Alpaca (réduisant de ce fait le Seestar au comportement d’une instrumentation classique).
Avec Tycho Tracker V13.5.1, le master dark est créé, les lights sont alors calibrées (suppression du bruit d’obscurité sur chaque brute avec le master dark), éclatées en trois canaux (RVB), résolues astrométriquement et alignées. Un résultat étonnant en découle quand les 67 lights parfaitement calibrées et alignées sont additionnées ; Et qu’un traitement final sur téléphone finalise le test :
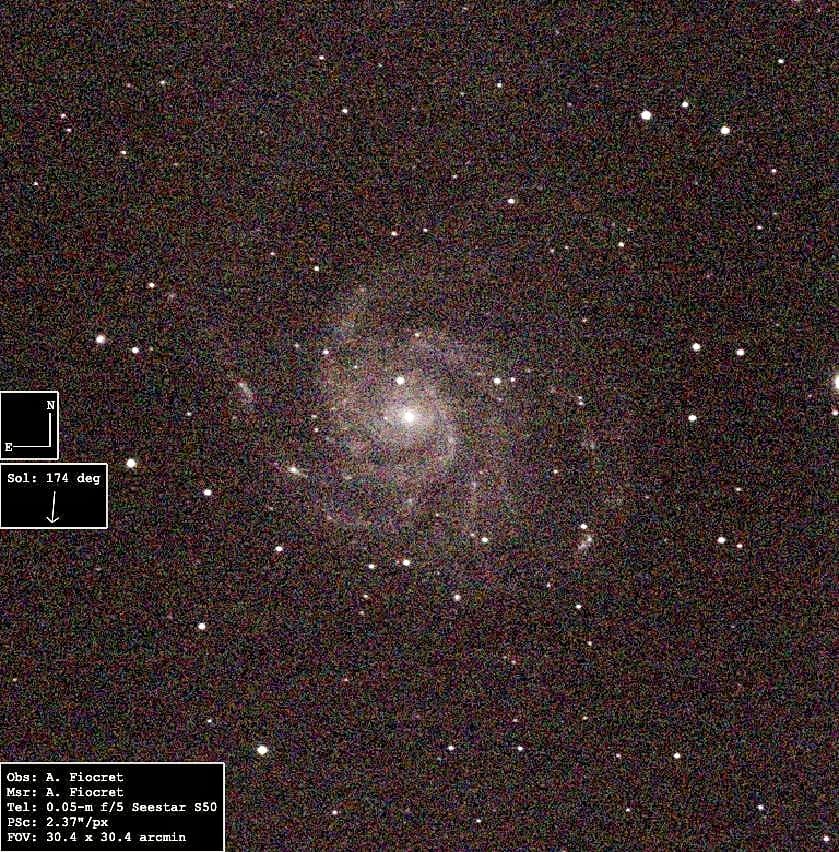
Il ne fait aucun doute qu’avec seulement 67 images (17 minutes de pose), le résultat est prometteur et permet de s’imaginer un peu le résultat si les lights avaient été dix fois plus nombreuses (l’équivalent d’un peu plus de deux heures de pose). Mes premiers tests avec NINA ont permis préalablement de prendre conscience avant de me lancer dans pareille opération d’acquisition d’autant d’images que si l’application propriétaire de ZWO fait en sorte de calibrer chaque light automatiquement et de maintenir le champ photographié bien centré sur le capteur pendant des heures sans effort (tout est déjà prévu dans le firmware du Seestar), les brutes produites par NINA montrent une légère dérive progressive du champ photographié de gauche à droite au cours du temps, ce qui prédispose de programmer soi-même cette correction continue dans le séquenceur avancé de NINA afin que le champ soit régulièrement recentré.
Juste après ce premier essai avec NINA, j’ai repris le contrôle du Seestar depuis l’application propriétaire android de ZWO ; l’usage de l’ordinateur face à ce ciel bien dégagé malgré une lune à 96% étant voué à désigner le nouvel astéroïde à pointer pour tester cette fois-ci la détection d’un objet très faible de ce type par lune (presque) pleine. Pour compliquer encore davantage la chose, C2A a été programmé pour trouver un astéroïde encore plus faible, de magnitude 17. Le choix se porte naturellement sur (4833) Mégès, un astéroïde troyen jovien d’environ 85 km de diamètre situé à plus de 5 UA de la terre découvert le 8 janvier 1989 depuis l’observatoire du Mont Palomar par la légendaire Carolyn S. Shoemaker (1929-2021). L’observation dure 1h avec des poses unitaires de 10 secondes.
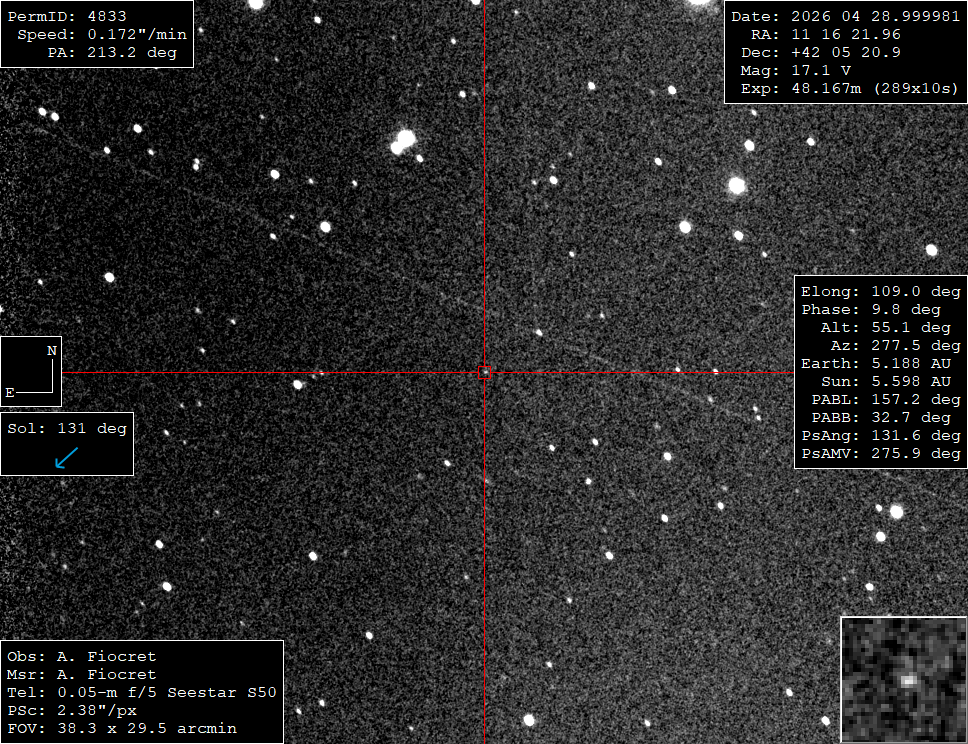
Malgré sa 17ème magnitude et une lune de 96%, la détection pure de (4833) Mégès se révèle encore un succès fantastique d’observation avec le Seestar S50. Toutefois, la sensibilité du Seestar marque quand même sa limite (à cause de la lune pleine ?) car Tycho Tracker est dans l’incapacité de produire une astrométrie qualitative avec un centroid difficile à ajuster dans cette configuration ; le résidu astrométrique atteignant une valeur supérieure à 4″, ce qui est particulièrement médiocre.
First Selected Obs=[2026 04 28.984381]
Last Selected Obs=[2026 04 29.015452]
Timespan=44.74 minutes; max residual = [4.665]
Mean RA residual = 2.046 +/- 2.095
Mean DE residual = 0.827 +/- 0.390